
空间信息领域的高阶 AI 提问方法与实操案例
本文基于卓老板《科技参考》中的“向AI提问的高阶技巧”,结合 3D Tiles 路线图及 GIS/空间智能/Geospatial 领域的专业知识,为您定制了三个实操案例和复用提示词。
方法一:预设逻辑格式提问
核心逻辑:不直接问“这个东西怎么样”,而是预设好评判标准(学术评价、行业应用率、技术替代性),强制 AI 按照你的逻辑框架进行调研和评估。
GIS 案例应用:基于 3D Tiles 2025+ 成果评估
本案例针对 3D Tiles 路线图,该图显示 3D Tiles 在 2025+ 将引入 Gaussian Splats(高斯泼溅)、Voxels(体素)、AEC 渲染等特性。
输入 Prompt (可以直接复制):
我上传了一张 OGC 3D Tiles 标准的发展路线图。请重点关注“2025+ (in progress)”这一列列出的新特性(如 Gaussian splats, Voxels, Non-earth ellipsoids 等)。我需要了解这些特性对于 三维 GIS (3D GIS) 领域到底意味着多大程度的突破。请不要泛泛而谈,必须严格按照我设定的以下逻辑格式进行回复:
1. **技术代差评估**:首先,请对比 1.1 版本(2023)的“Implicit tiling/gLTF”,分析 2025+ 中的“Gaussian splats”和“Voxels”在底层数据结构和渲染原理上是否存在“范式转移”级别的差异?(是单纯的优化,还是维度的升级?)
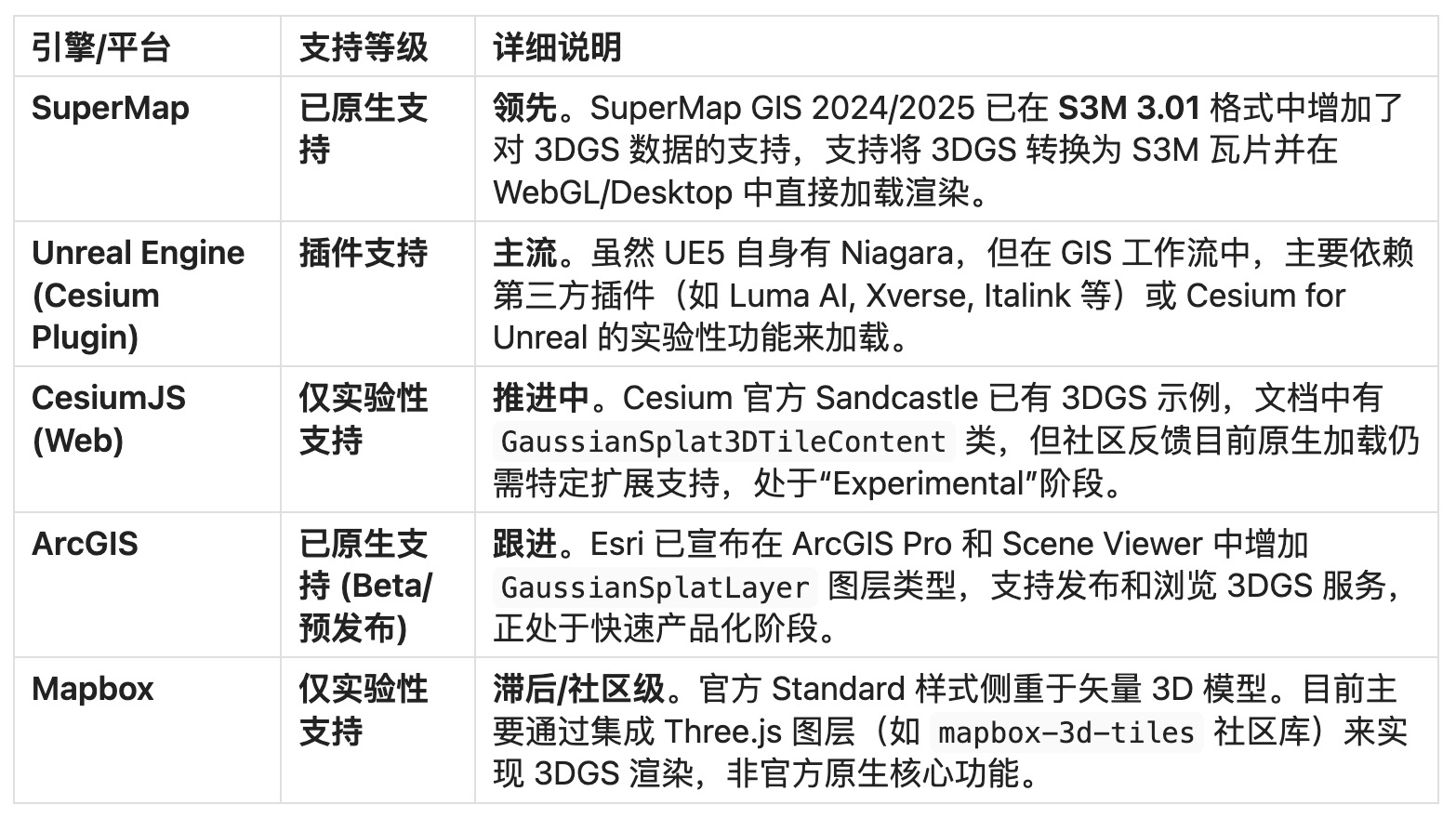
2. **成熟度量化统计**:其次,请搜索并统计目前 GIS 头部引擎(如 Cesium, Mapbox, ArcGIS, Unreal Engine GIS插件,Supermap)对 Gaussian Splats 的支持情况。请用“已原生支持”、“插件支持”、“仅实验性支持”三个等级进行分类。
3. **未来落地预判(两级标准)**:最后,请基于上述分析给出结论。
* **级别 1 判据**:这些技术是否仅仅会停留在可视化展示(Visualization)层面?
* **级别 2 判据**:这些技术是否具备在未来 5 年内,取代传统三角网格(Mesh)成为城市级实景三维(Reality Capture)主流交付格式的可能性?
请最后以表格形式总结上述三个维度的分析结果。
高段位复用提示词
[背景/文件]:我提供了一个关于 [主题,如:某新型遥感大模型] 的资料。
[核心需求]:我要评估其在 [特定领域,如:自动驾驶高精地图] 中的实际价值。
[预设逻辑]:请严格按以下步骤回答:
1. **理论上限评估**:对比现有主流技术 [竞品/旧技术],该成果的核心指标(如精度、效率)理论提升倍数是多少?
2. **工程化壁垒分析**:统计要在 [具体场景] 中落地该技术,需要解决哪些前置条件(如算力成本、数据清洗难度)?
3. **终极判据**:请按两个等级评估——等级 A(仅适合发论文/Demo)、等级 B(具备成为下一代行业标准的潜力)。
方法二:多案并行讨论
核心逻辑: 不要让 AI 给出一个“标准答案”,而是强迫它生成多条独立的逻辑链条(技术路线),并进行横向博弈和对比,从而找到最优解。
空间智能案例应用:构建城市级数字孪生底座的技术选型
假设你是一个 CTO,需要决定用什么数据库技术来支撑一个 PB 级的城市数字孪生项目。
输入 Prompt (可以直接复制):
我正在负责一个“城市级空间智能底座”的架构设计,数据量级为 PB 级,包含海量的矢量数据、倾斜摄影模型、BIM 模型以及实时的 IoT 传感器流数据。我们需要选择核心的时空数据库方案。
请不要直接给我推荐某一个数据库,而是给出 3 个逻辑上完全独立的技术路线方案,并对比它们的成功率和适用性:
* **方案 A**:基于传统关系型数据库扩展的路线(如 PostgreSQL + PostGIS + 3D 扩展)。
* **方案 B**:基于云原生/大数据架构的路线(如 Geoparquet + Iceberg + ClickHouse/Spark)。
* **方案 C**:基于图数据库或语义网的路线(如 Neo4j 结合空间插件,强调知识图谱关联)。
请在回答中详细推演每种方案在处理“复杂三维空间查询(如 3D 缓冲区分析)”时的性能表现,以及维护成本。
最后,请模拟这三个方案在“政府汇报演示”与“实际高并发业务调用”两个场景下的博弈关系(例如:哪个演示效果好但实战会崩?)。
高段位复用提示词
[问题场景]:我面临 [具体难题,如:卫星影像去云层遮挡] 的问题,目标是 [具体目标,如:保留地物纹理细节]。
[并行要求]:请给出 [N] 条逻辑上独立的解决方案:
* 方案 1 侧重于 [侧重点 A,如:传统算法]。
* 方案 2 侧重于 [侧重点 B,如:生成式 AI]。
* 方案 3 侧重于 [侧重点 C,如:多源数据融合]。
[对比分析]:请对比这些方案在 [关键指标,如:计算耗时 vs 还原精度] 上的表现,并指出各自的“致命弱点”。
方法三:提出难度梯度平滑的要求
核心逻辑:当面对极其晦涩的空间算法或数学概念时,让 AI 像一个体贴的老师,搭建“台阶”,从小白科普到硬核数学推导,分层讲解。
Geospatial 案例应用:解释“希尔伯特曲线 (Hilbert Curve)”在空间索引中的作用
这是一个非常经典但数学原理复杂的 GIS 概念。
输入 Prompt (可以直接复制):
我在研究高性能空间索引,经常听到“希尔伯特曲线 (Hilbert Curve)”比“Z-Order 曲线 (Geohash)” 更好,但我对其中的数学原理理解不深。
请用 4 个难度梯度递增的方式,为我解释希尔伯特曲线在地理空间索引中的原理和优势:
* **L1 (直觉层/小学生)**:用“去超市买东西”或者“整理书架”的类比,解释为什么我们需要这种曲线把二维地图变成一维线条?
* **L2 (应用层/GIS用户)**:用可视化的描述,解释为什么在针对矩形区域进行空间查询时,Hilbert 曲线产生的“突变”比 Z-Order 少?(即空间局部性更好)。
* **L3 (代码层/开发者)**:简要解释如何将经纬度 (Lat, Lon) 编码为 Hilbert Value 的算法逻辑,涉及哪些位运算?
* **L4 (数学层/算法科学家)**:从分形几何和空间填充曲线 (Space-filling curve) 的数学性质出发,给出其聚类性 (Clustering) 的数学证明或误差分析公式。
高段位复用提示词 (Template)
[知识点]:这个 [复杂概念,如:卡尔曼滤波在 GPS 定位中的应用] 我完全不懂。
[梯度要求]:请用 [3-4] 种难度递增的方式给我解释。虽然逻辑上需要严密,但我首先需要听懂。
* **Level 1**:用生活中的类比(不许出现任何术语)。
* **Level 2**:用行业通用的业务逻辑解释(可以出现基础术语)。
* **Level 3**:用数学公式、代码伪代码或底层物理原理进行硬核推导。
[目标]:让我从感性认识平滑过渡到理性掌握。
补充:用第一个案例的测试结果(gemini pro 2.5): 这是一份基于 OGC 3D Tiles 发展路线图及 2025+ 新特性的深度技术评估。
1. 技术代差评估:范式转移
对比 1.1 版本(Implicit Tiling/gLTF)与 2025+ 版本(Gaussian Splats, Voxels),这不仅是单纯的优化,而是底层数据结构与渲染原理的“范式转移”。
从“显式几何”到“概率体积”:
- 1.1 版本 (Mesh/gLTF):基于显式几何 (Explicit Geometry)。世界由确定的三角形(Vertices, Indices, UVs)构成。渲染本质是光栅化(Rasterization),对拓扑结构要求高,难以表达毛发、树叶、半透明物体等复杂细节。
2025+ (Gaussian Splats/Voxels):基于隐式/体积表示 (Implicit/Volumetric Representation)。
- Gaussian Splats 将世界离散化为数百万个带有 3D 位置、协方差(形状/旋转)、不透明度和球谐函数(颜色/光照)的“高斯球”。渲染过程是“泼溅 (Splatting)”而非三角形光栅化。它不存储确定的“面”,而是存储空间的“属性分布”。
- 这是维度的升级,因为它引入了可微分渲染 (Differentiable Rendering) 的特性,使得从 2D 图像反向训练 3D 场景成为可能,且能完美还原“视线相关 (View-Dependent)”的光影效果(如玻璃反光),这是传统 Mesh 极难做到的。
2. 成熟度量化统计 (截至 2024/2025)
3. 未来落地预判
基于上述技术原理与行业现状的推演:
级别 1 判据(可视化层面): 完全达成。
- Gaussian Splats 将成为展示复杂场景(如植被茂密的公园、复杂的变电站、室内装修)的绝对首选。它解决了倾斜摄影(Mesh)在精细结构上产生的“融化”和“拉丝”现象,视觉体验是降维打击。
级别 2 判据(取代 Mesh 成为主流交付格式): 否定(未来 5 年内不可全替代)。
- 致命短板:3DGS 缺乏拓扑信息和物理边界。
- 理由:在 GIS 的核心业务——“空间分析”中(如:洪水淹没分析、视域分析、建筑物单体化查询、物理碰撞检测),必须要有确定的“面”和“体”。高斯球只是一堆带颜色的“雾”,计算机很难判断“哪里是墙的各种边界”。
- 结论:未来的主流交付格式将是 “Hybrid(混合)”模式——用 Mesh 做物理底座(用于分析、挂载业务属性),用 Gaussian Splats 做视觉蒙皮(用于人眼观看)。
总结表格
